FIRST Robotics Competition (FRC)
From 2022–2025, I was a member of FRC Team 1086 Blue Cheese Robotics.
I was Design Lead from 2023–2024 and served as Team Captain in 2025.
Through four competition seasons and the offseasons, I worked on full-system mechanical design, controls architecture, and robot integration under aggressive build timelines.
2025
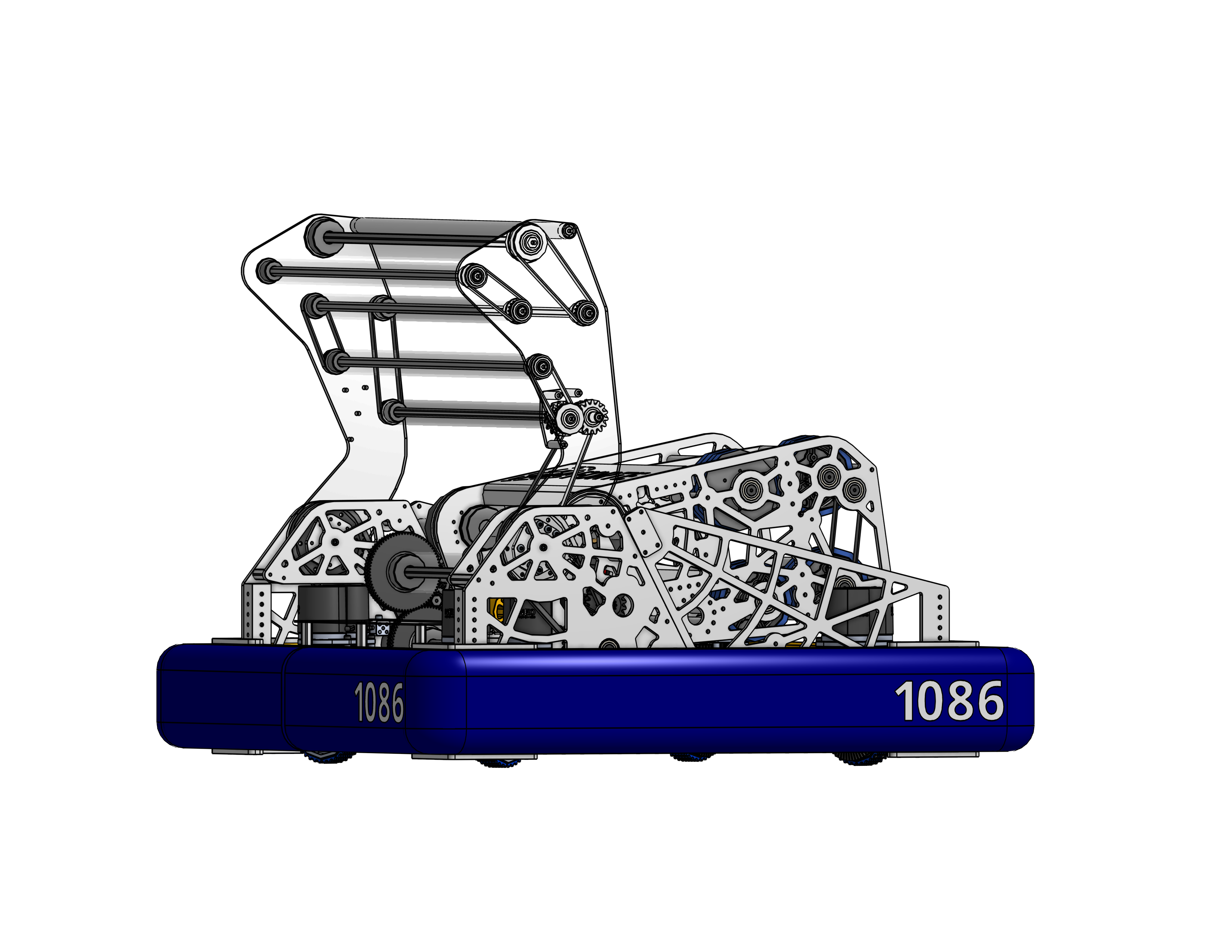
In 2025 I was responsible for the full mechanical design (CAD) and primary software architecture of our competition robot. The system integrated a 3-stage continuous elevator, multi-mode end effector, Dyneema-driven climber arm, and full 3D vision localization under a unified trigger-driven state machine.
The robot scored PVC pipes at four levels from 1.5–6 ft and in an 8 ft high ball net from a 3.5 ft starting height.
Mechanical Architecture
System-Level CAD Ownership
I led CAD for the complete robot assembly, including:
- Elevator carriage and lift system
- Intake and scoring mechanisms
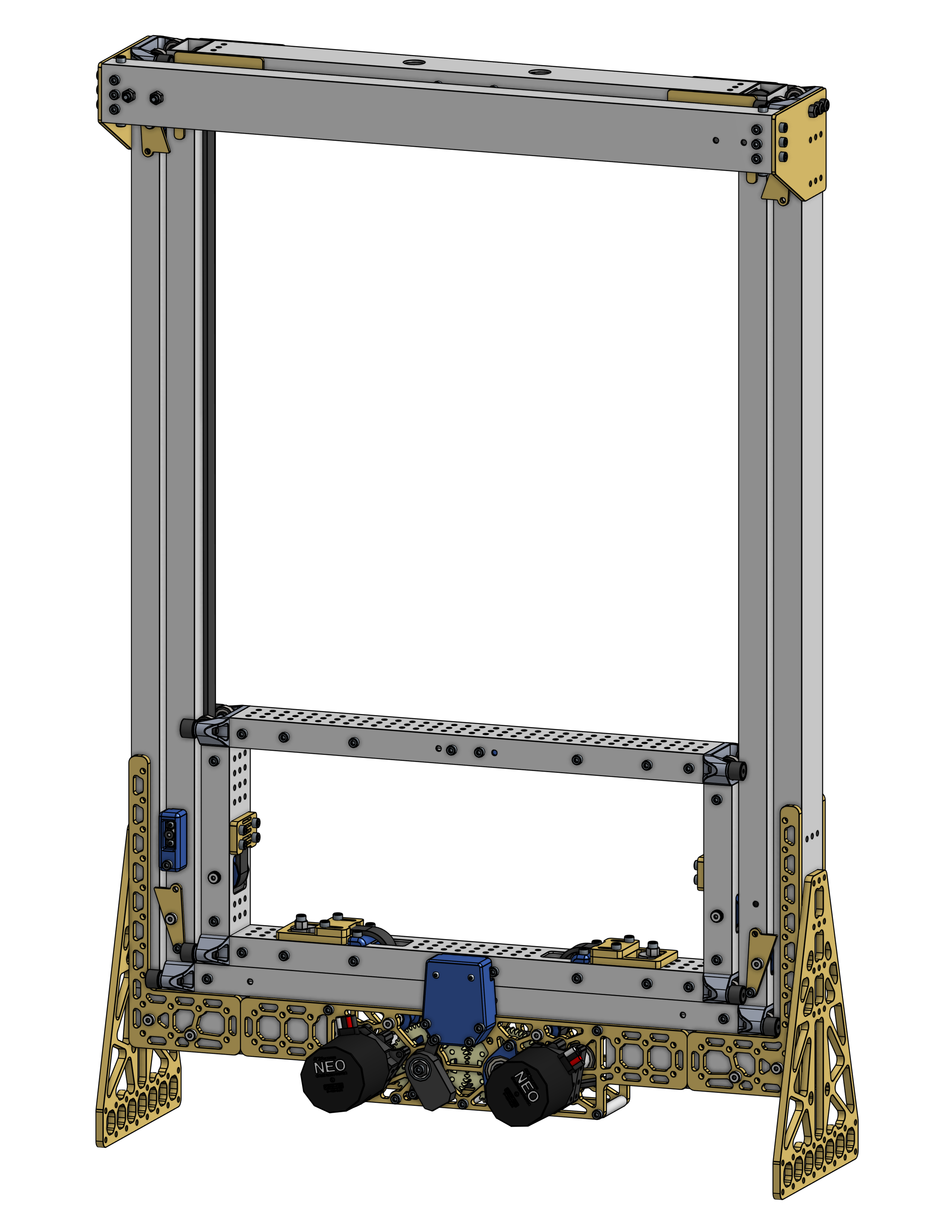
- Structural frame packaging
- Electrical routing & serviceability design
Rather than designing subsystems in isolation, I worked top-down using master layout geometry that propagated down to each subsystem.
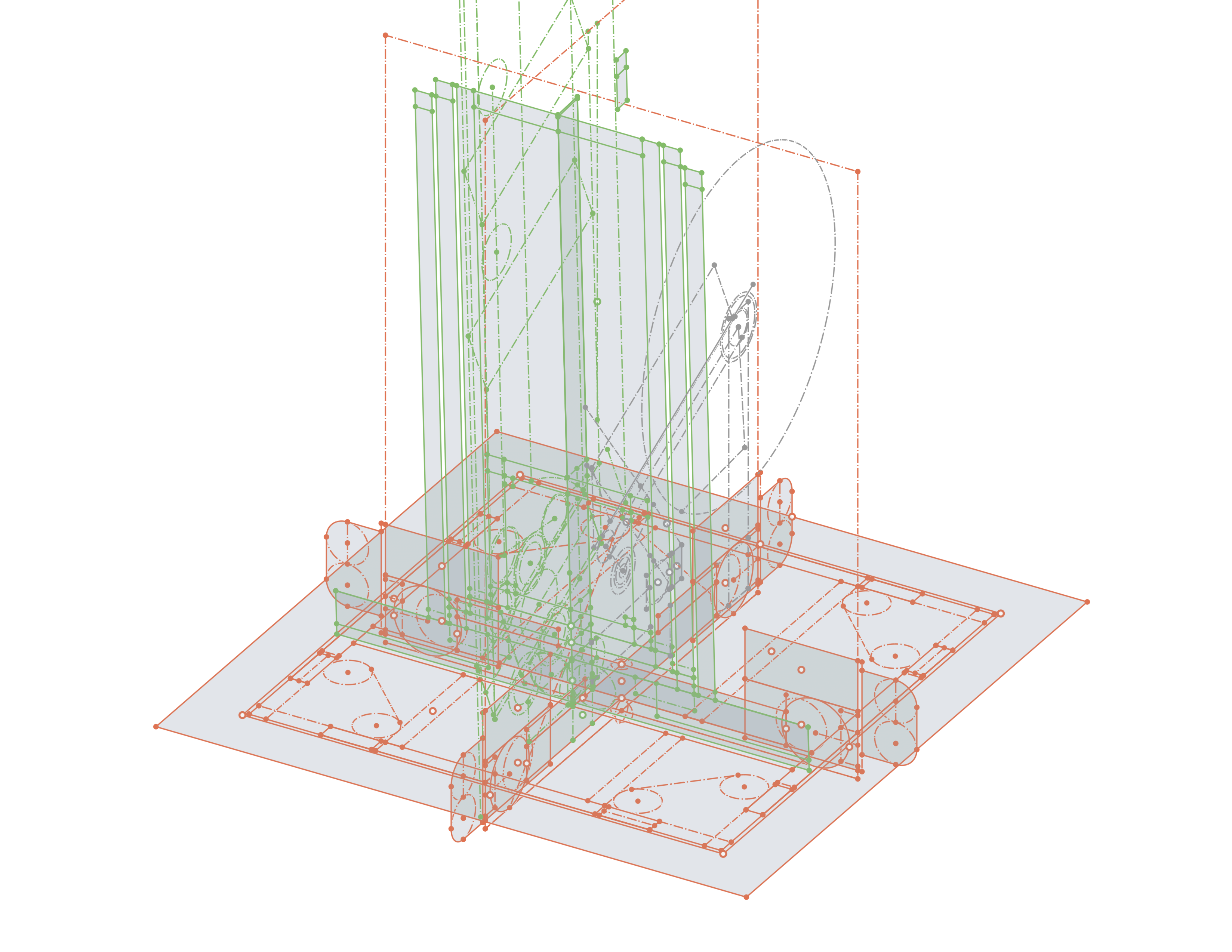
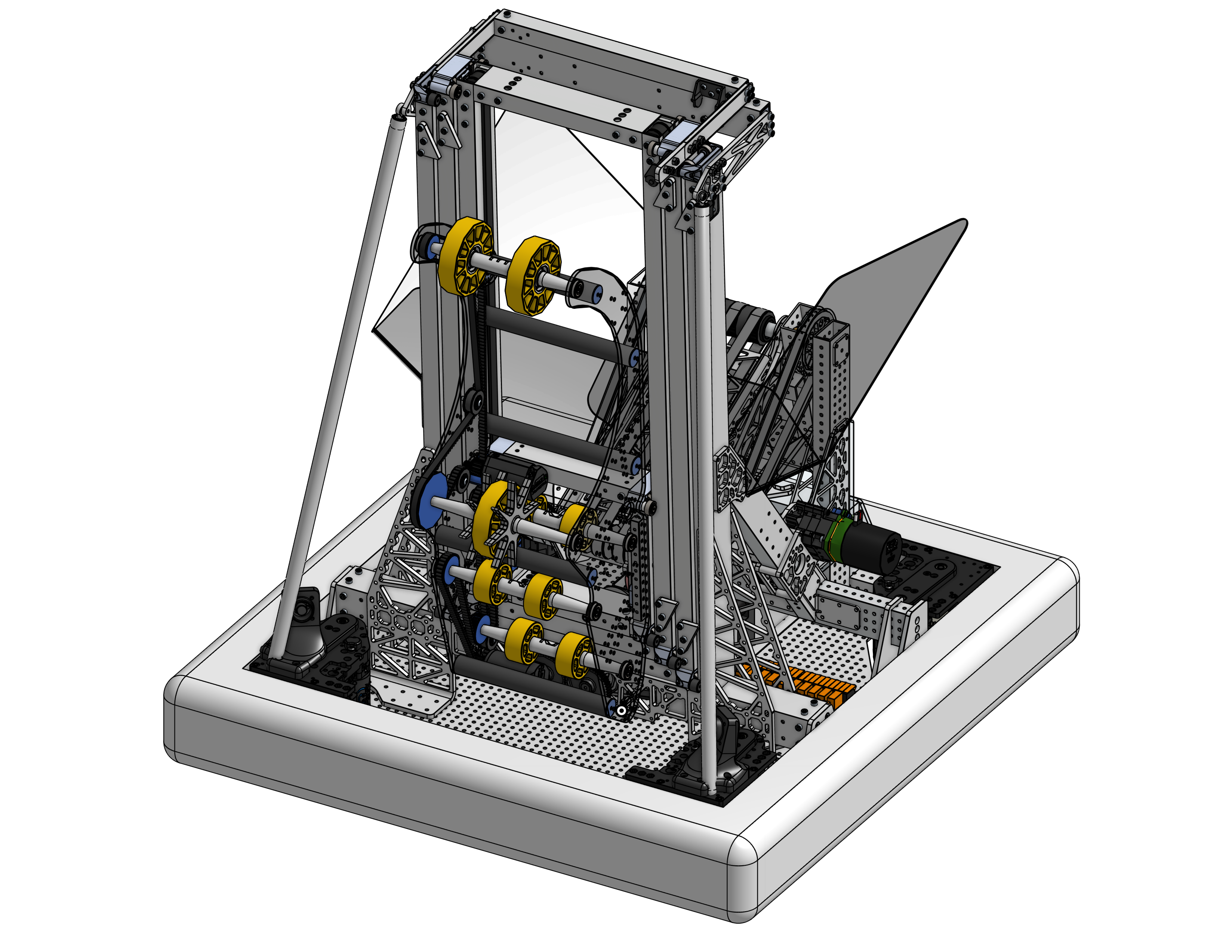
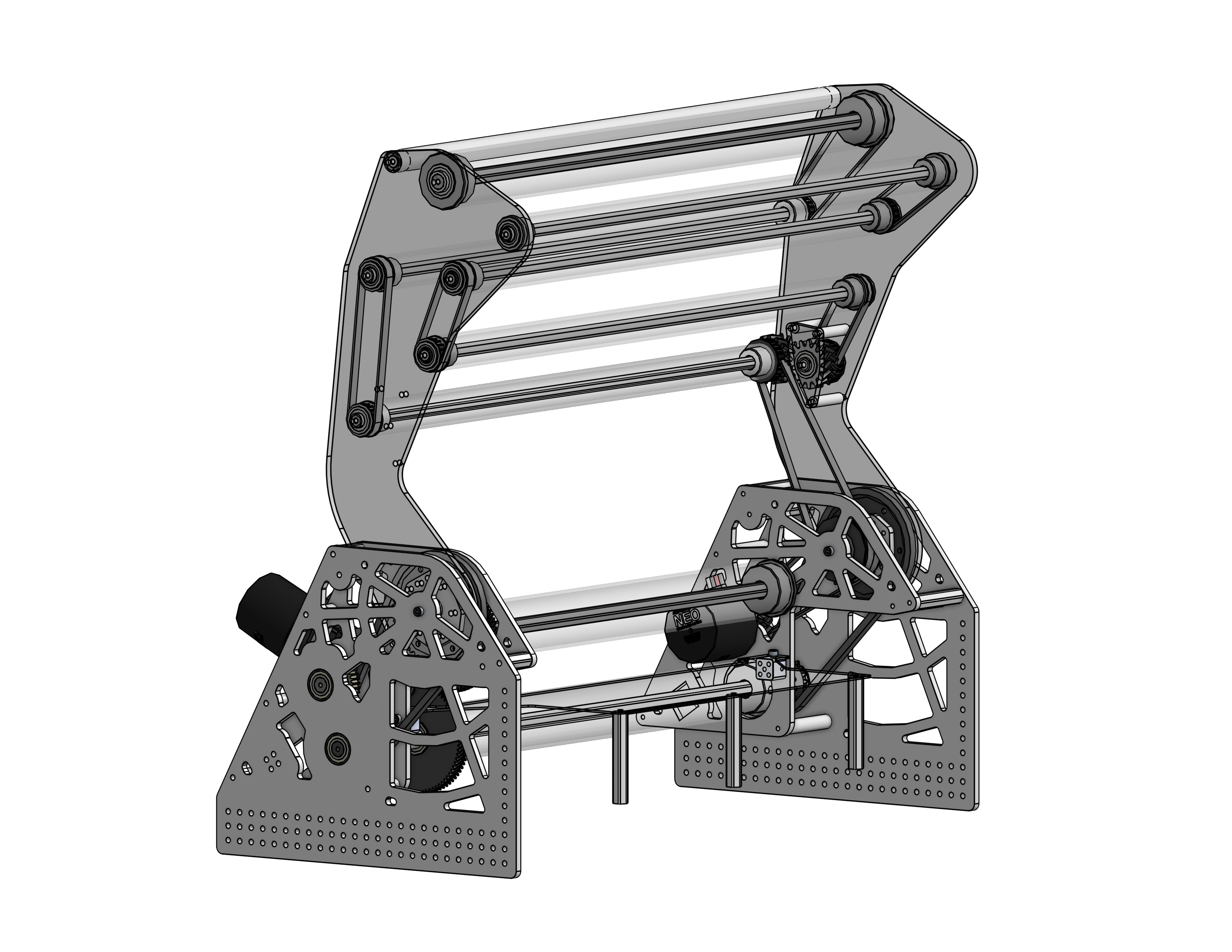
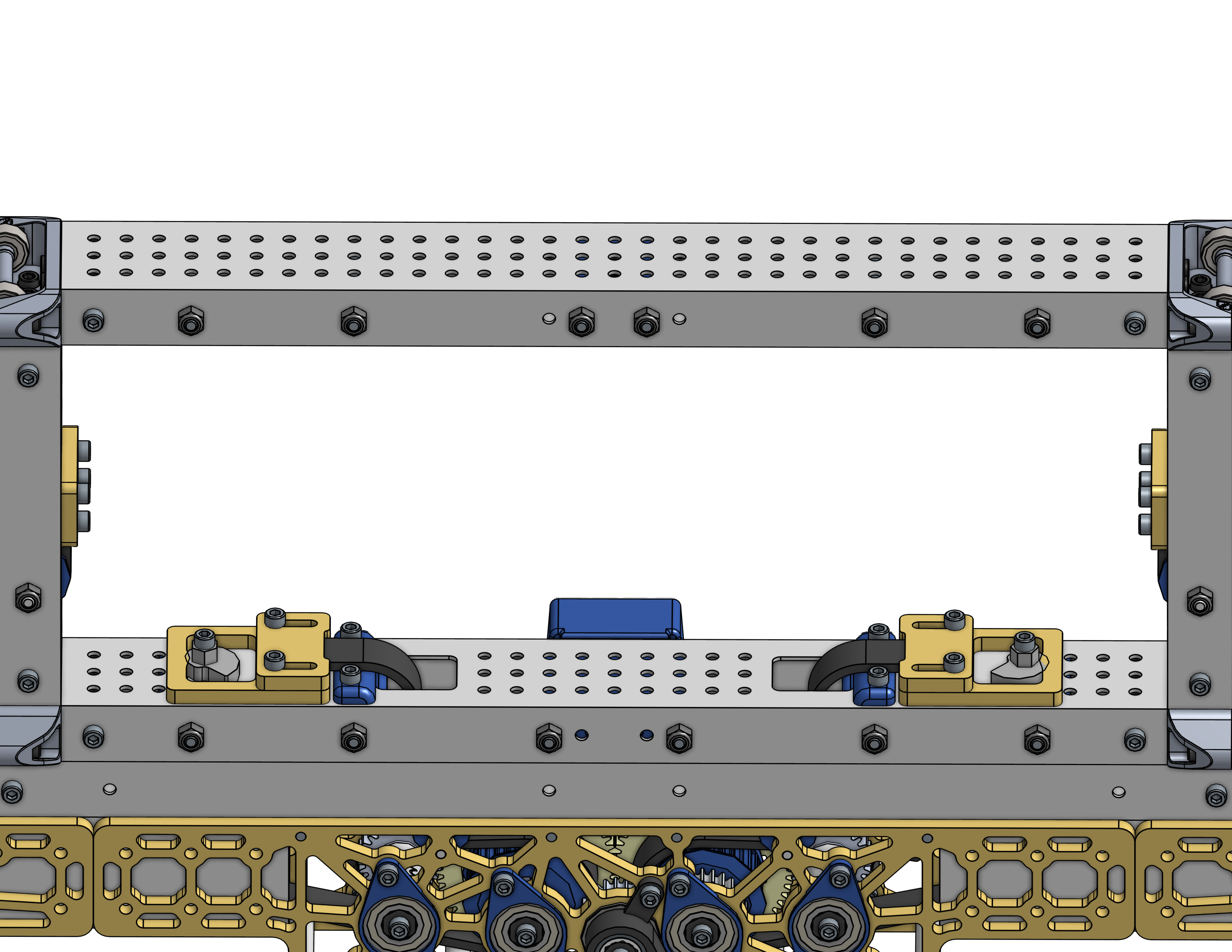
3-Stage Continuous Elevator
- Internally routed 5mm HTD belts (18mm wide)
- One slotted cam tensioner per side
- Slotted tube routing with idler pulleys on bushings
- Cam-based belt clamping
- Reinforced corner brackets to mitigate racking
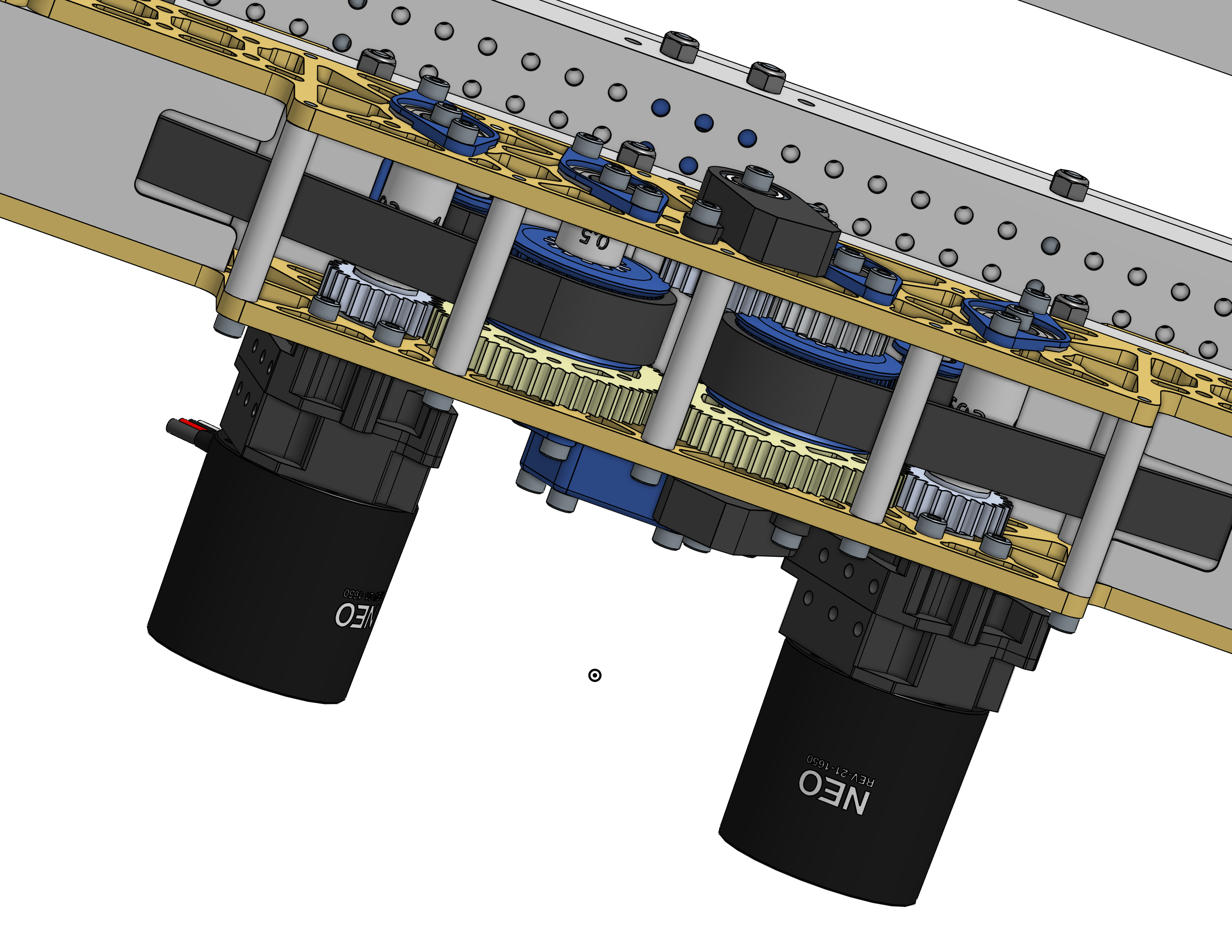
Drive configuration:
- 2× Kraken X60 motors
- 5:1 reduction
- 30T 5mm HTD pulleys
- 90A current limits
- Motion-profiled PID control
Performance:
- ~25 lb moving mass
- ~3.5 m/s peak extension velocity
- ~0.5 s full extension

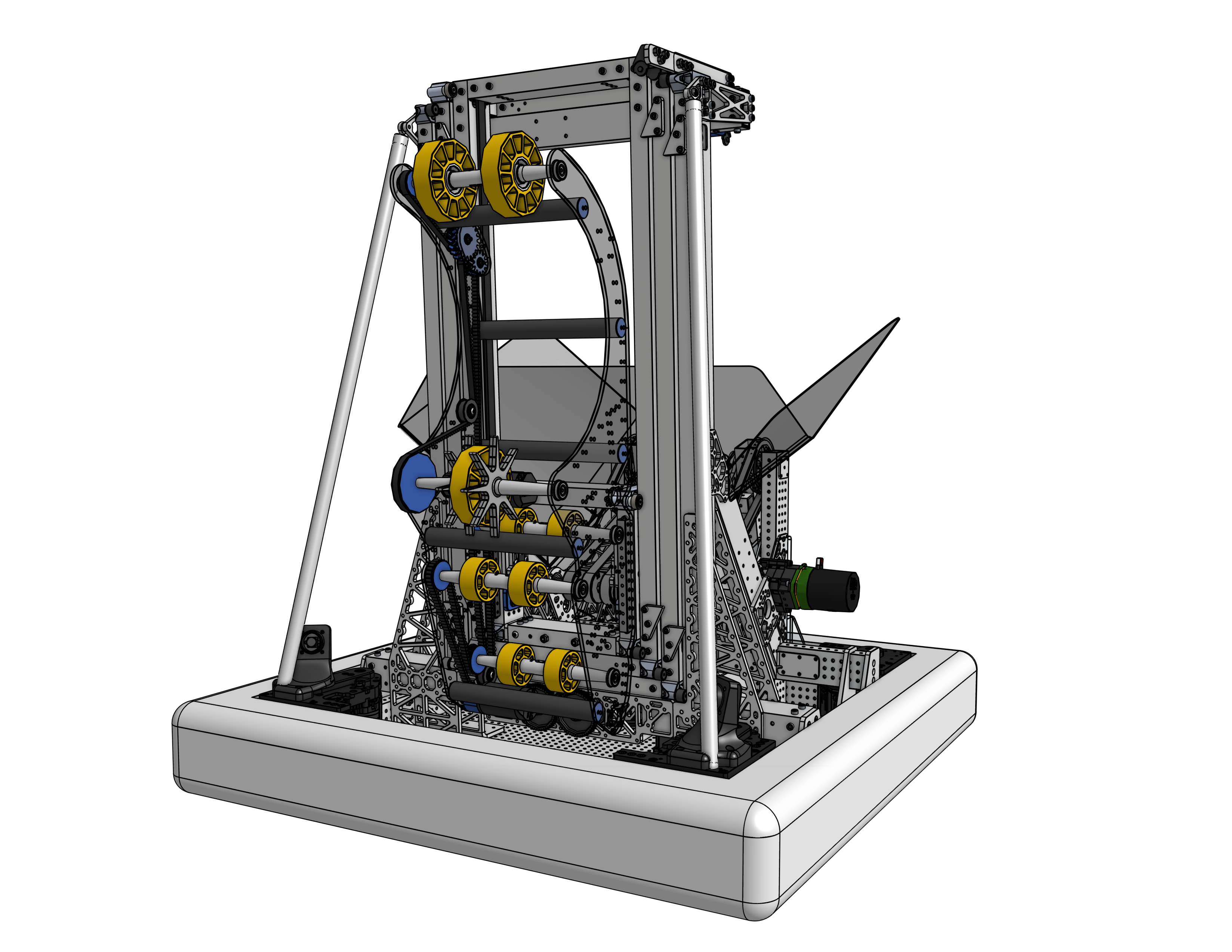
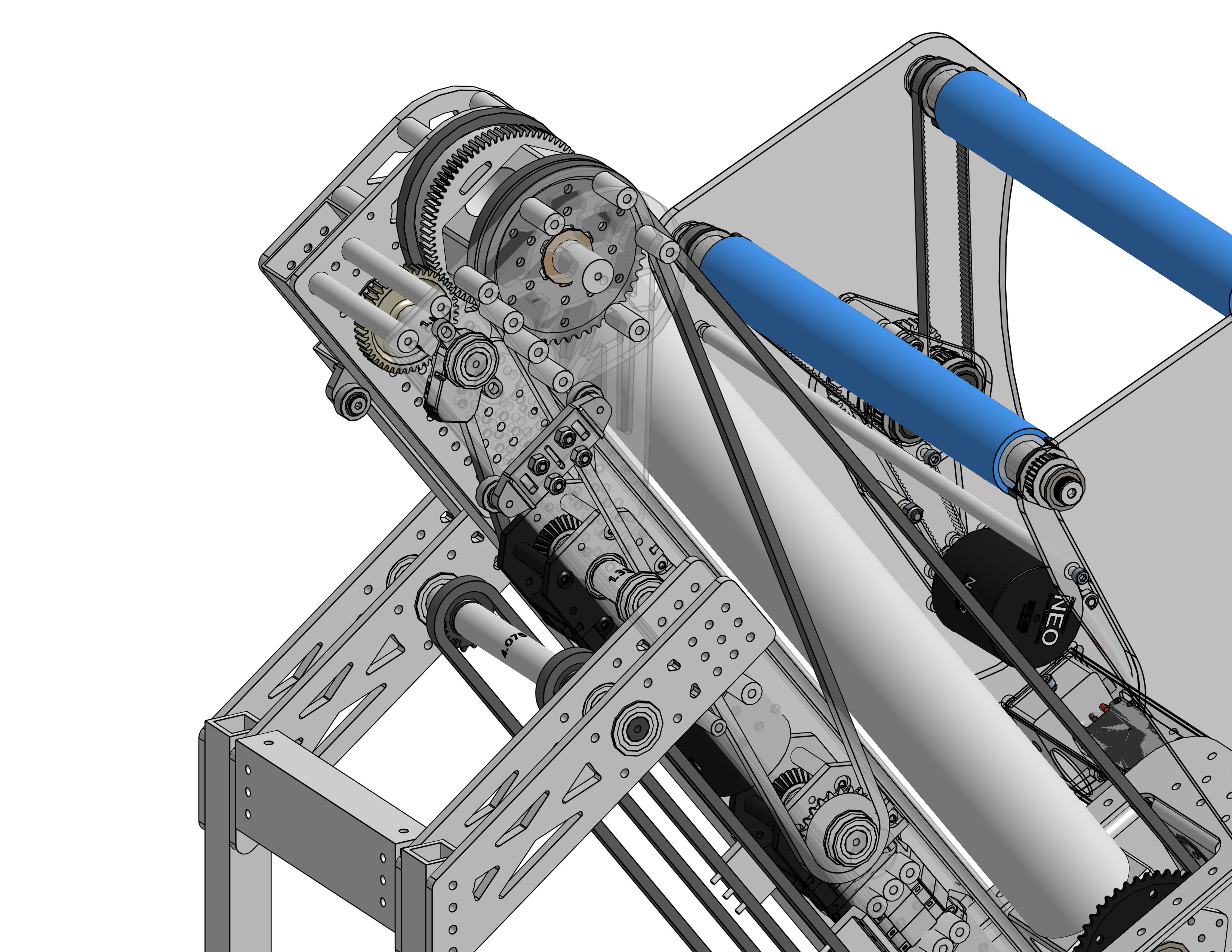
More Renders
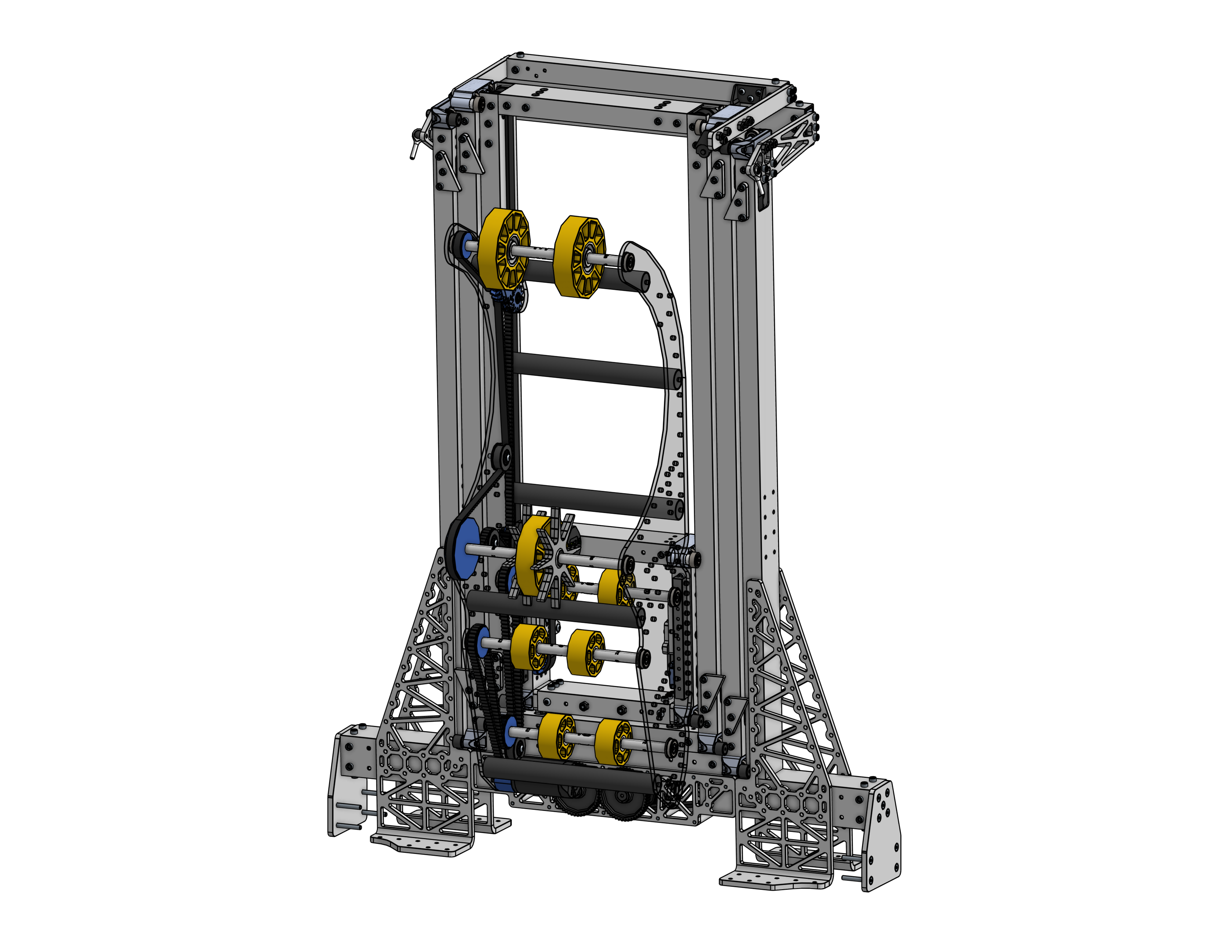
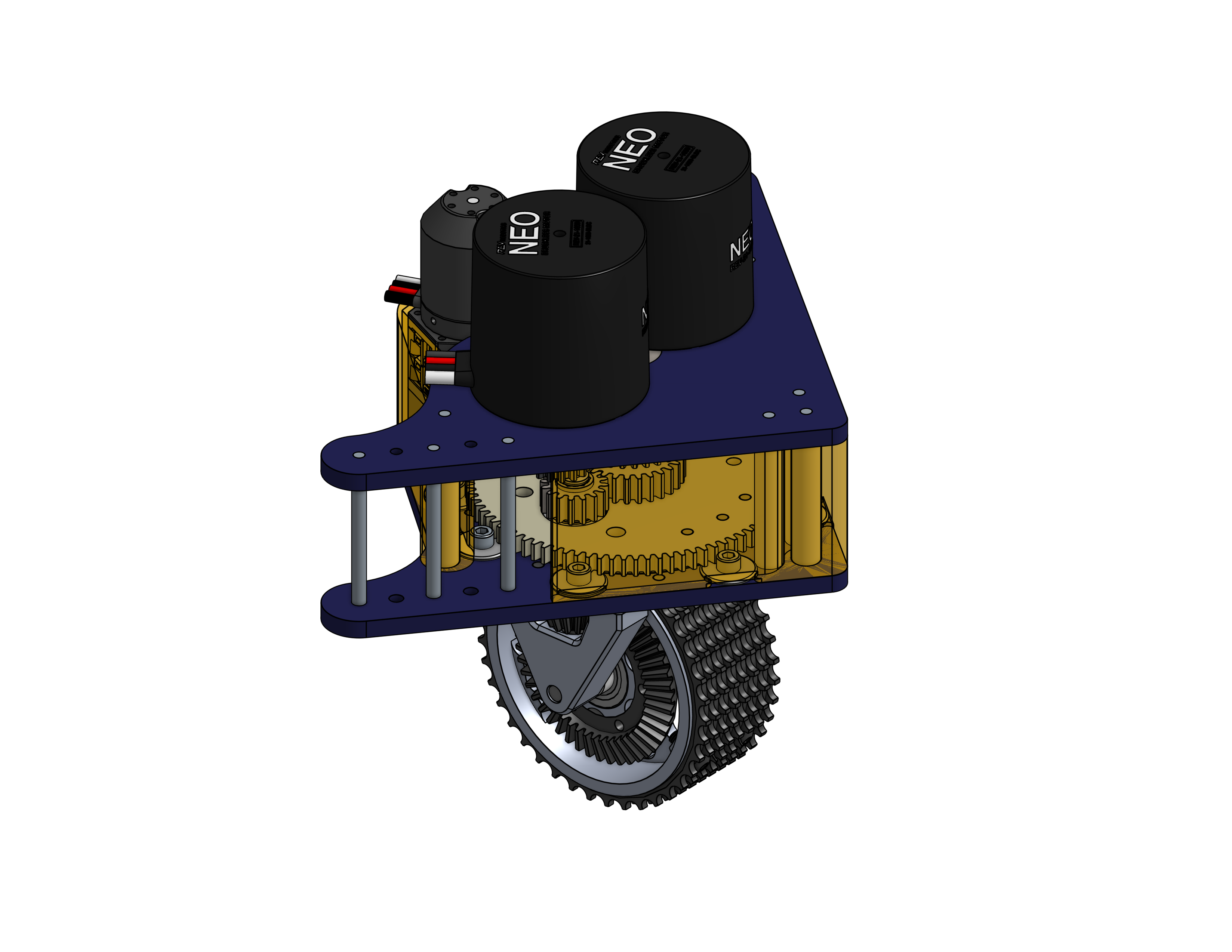
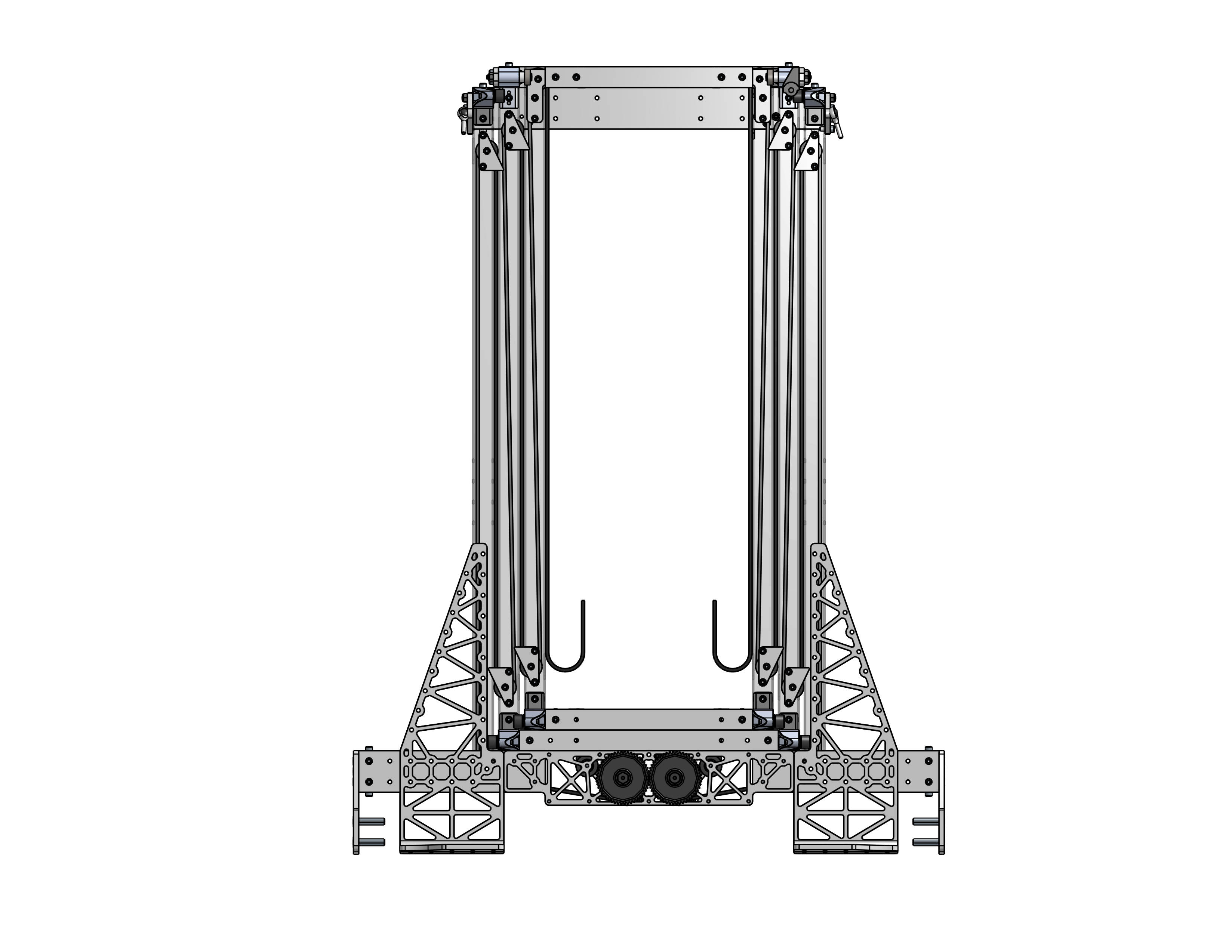
Full 3-stage continuous elevator assembly.
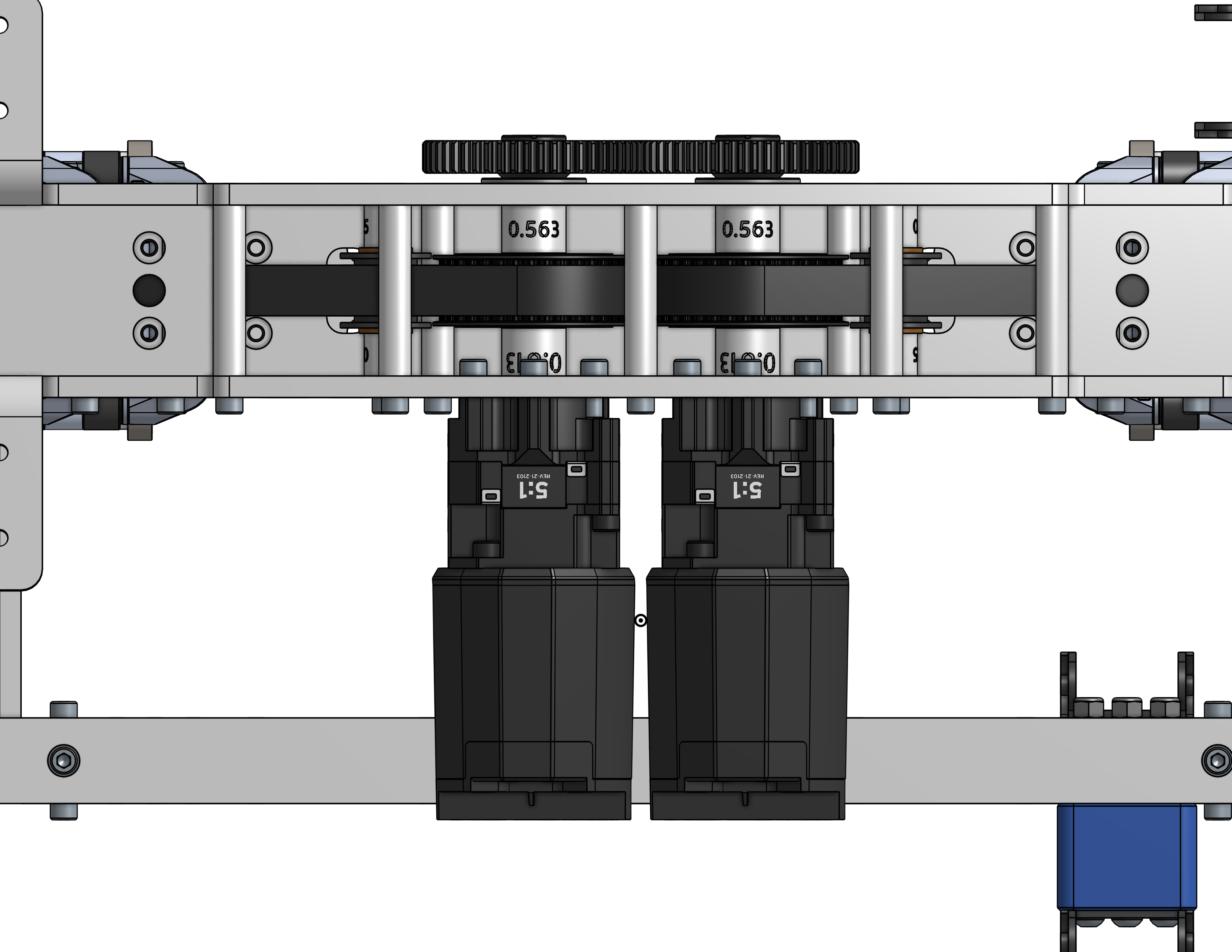
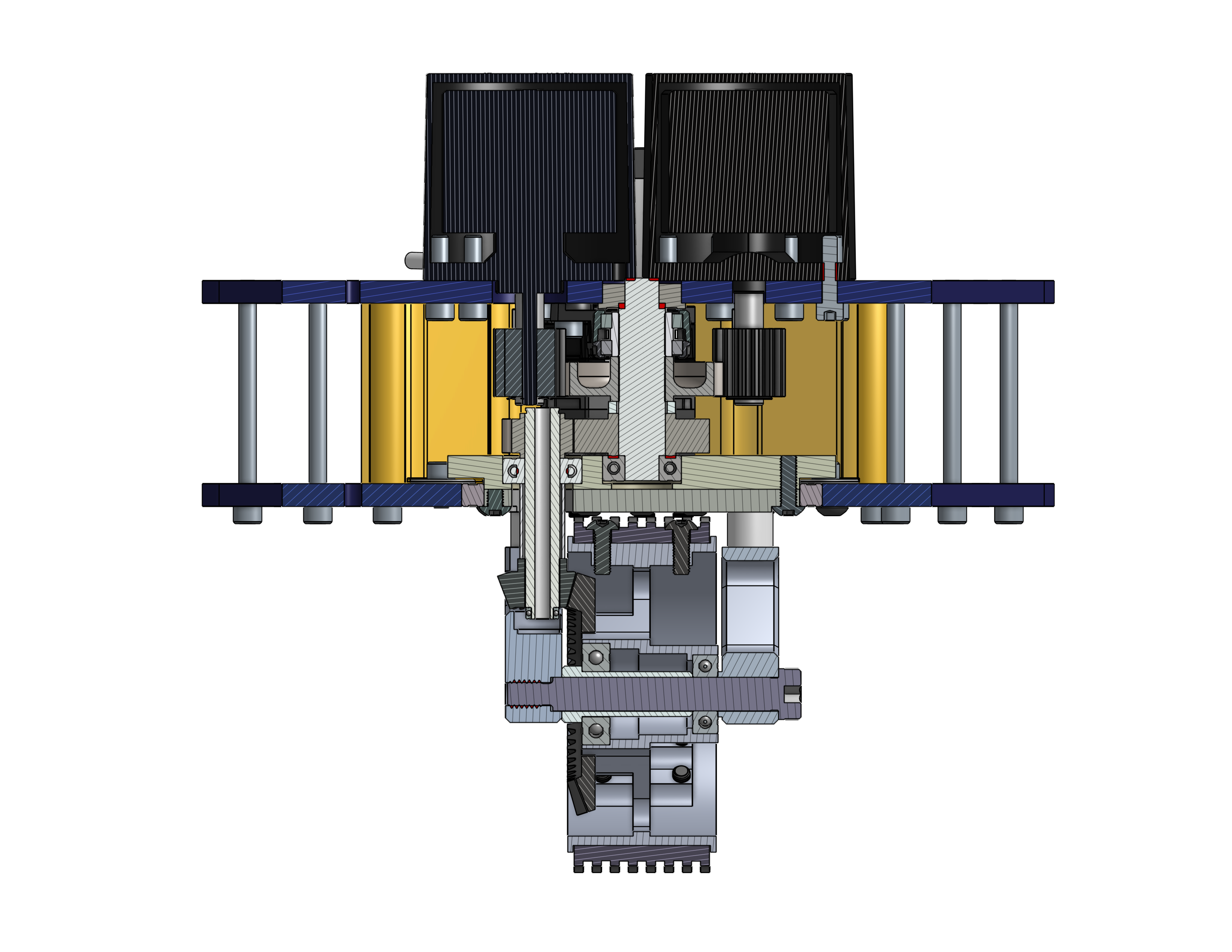
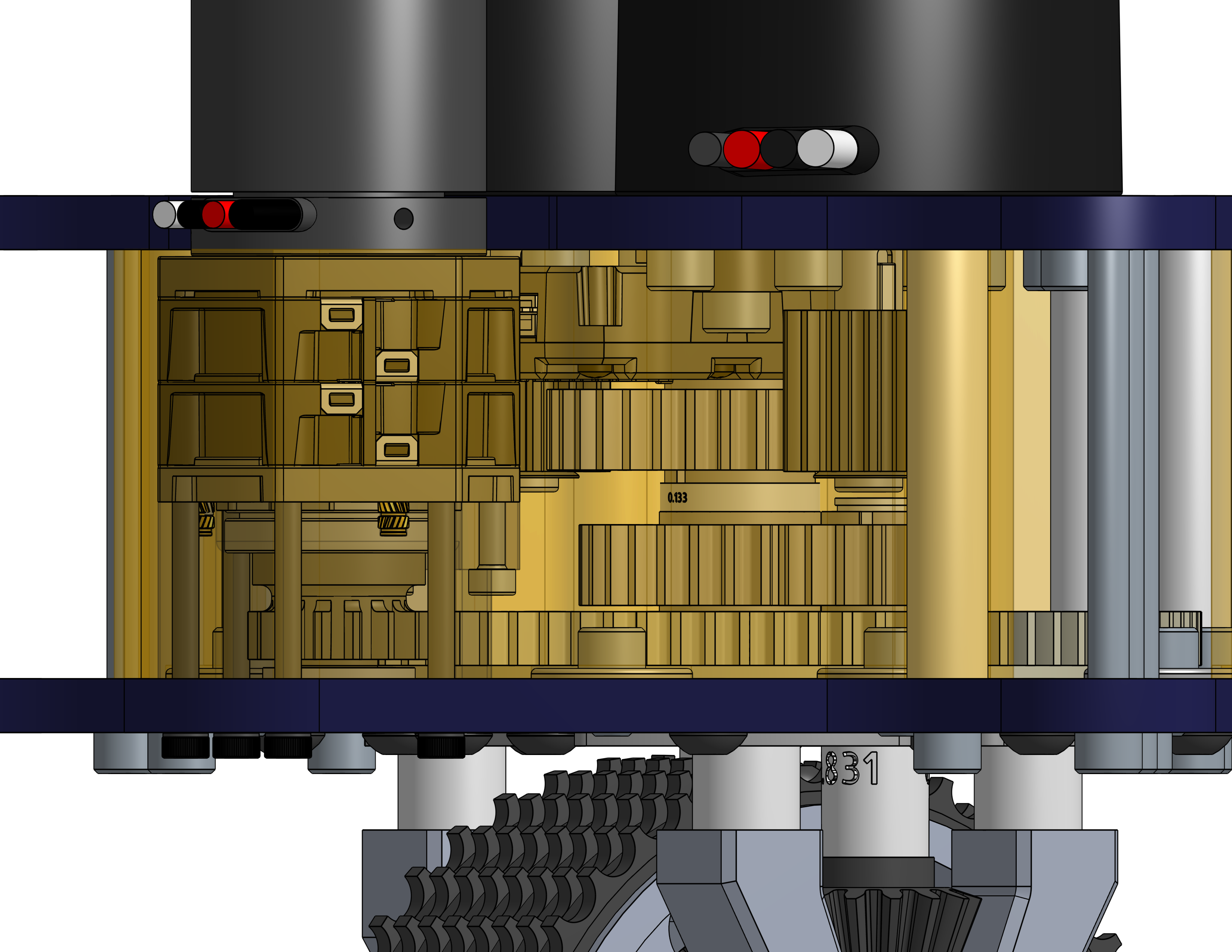
Dual Kraken X60 5:1 gearbox driving 30T HTD pulleys.
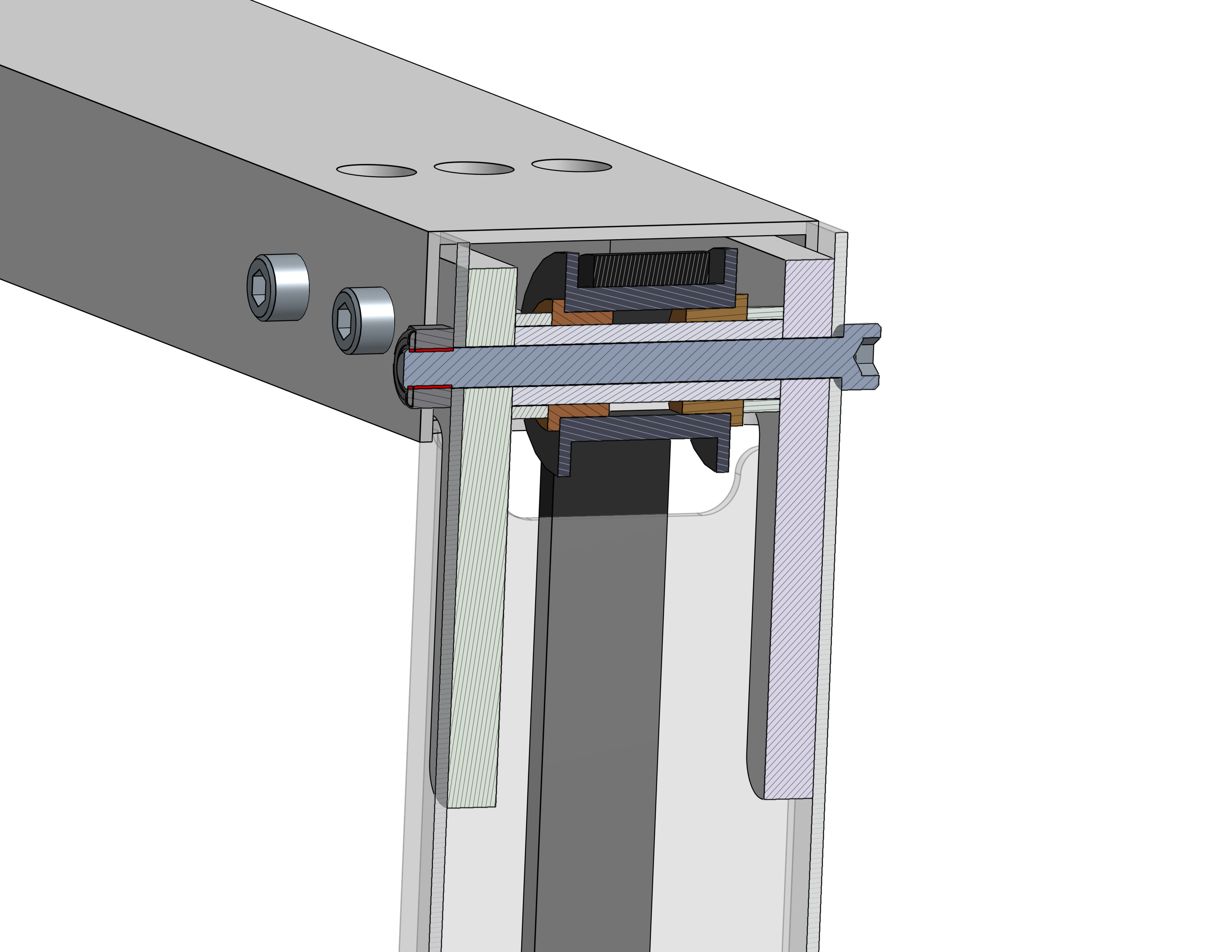
Section view of slotted tube with bushing-supported idler.
Internally routed 5mm HTD continuous belt architecture.
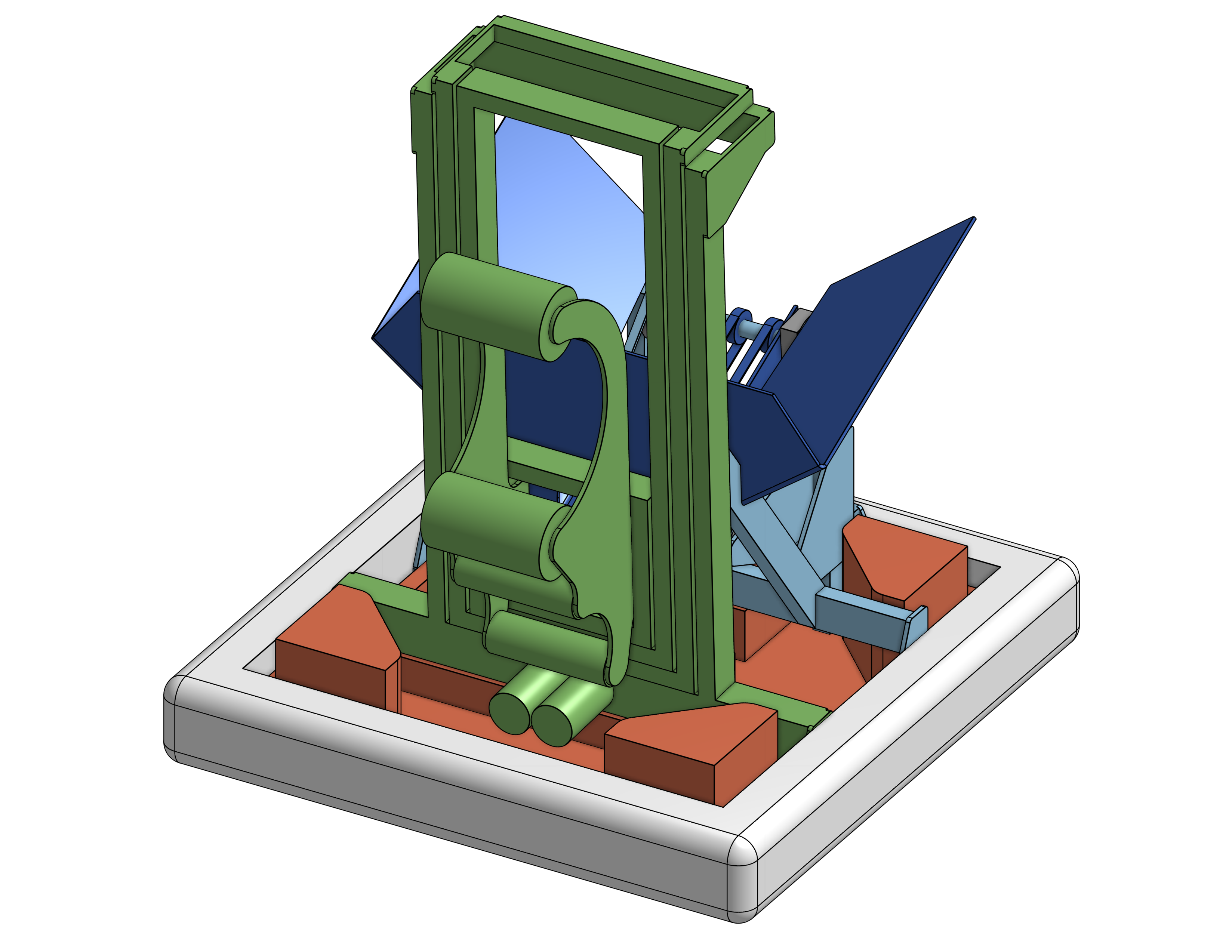
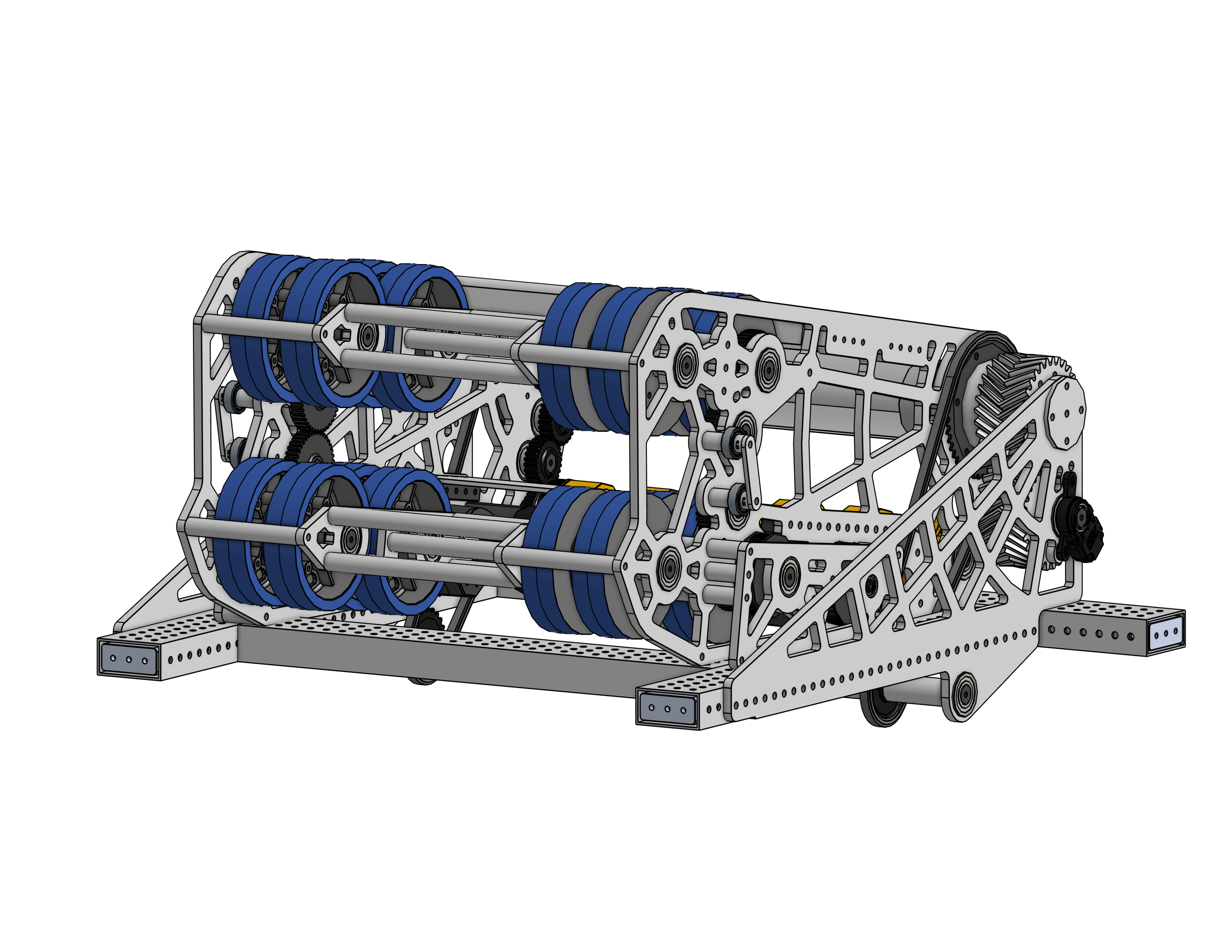
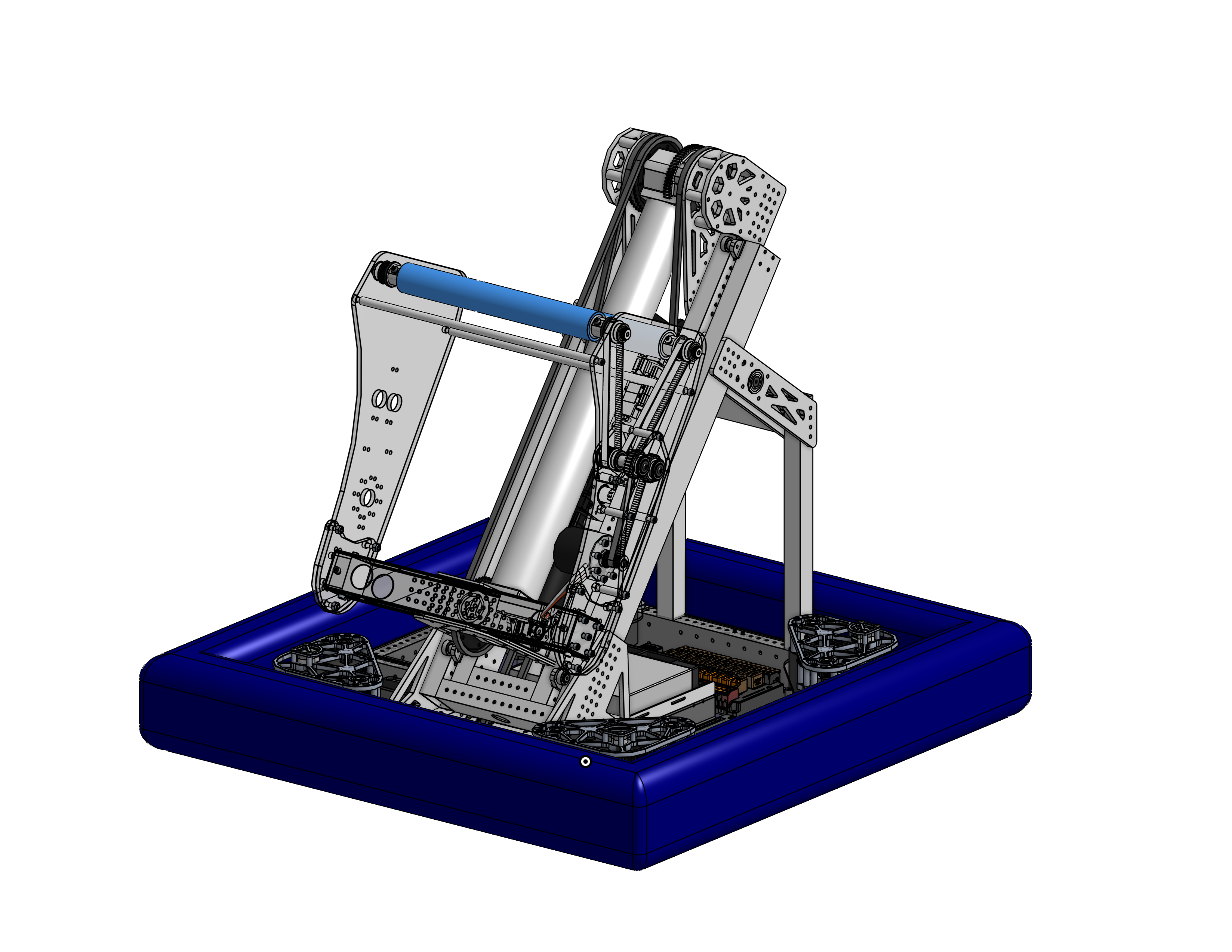
End Effector
Dual-mode mechanism supporting PVC scoring and 8 ft ball net scoring.
- Dual powertrains (PVC + ball control)
- Double-sided belt drive
- Carbon fiber structural members
- Custom eccentric TPU agitator wheels
- Dual infrared sensors for gamepiece detection
Sensor detection fed directly into automated state transitions.
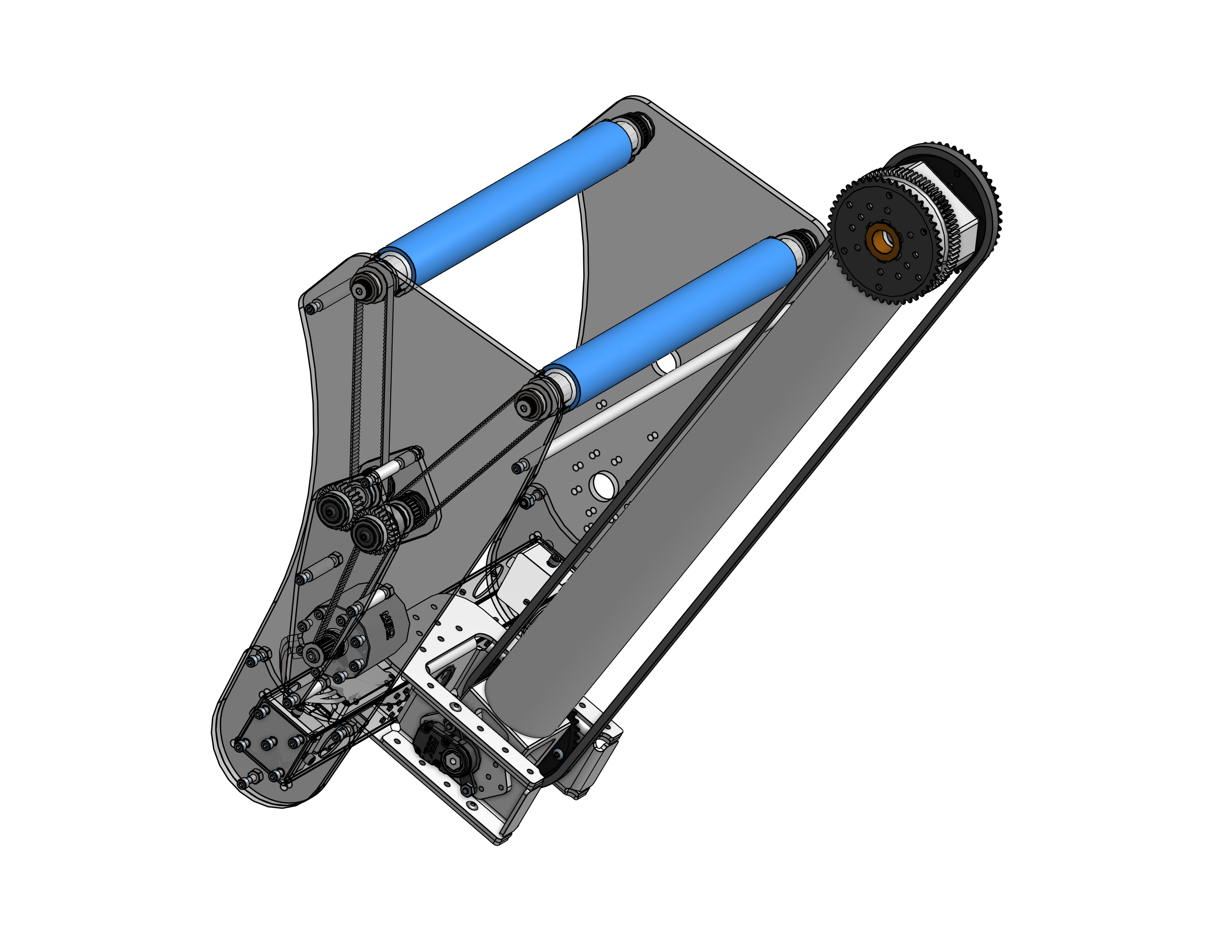
More Renders
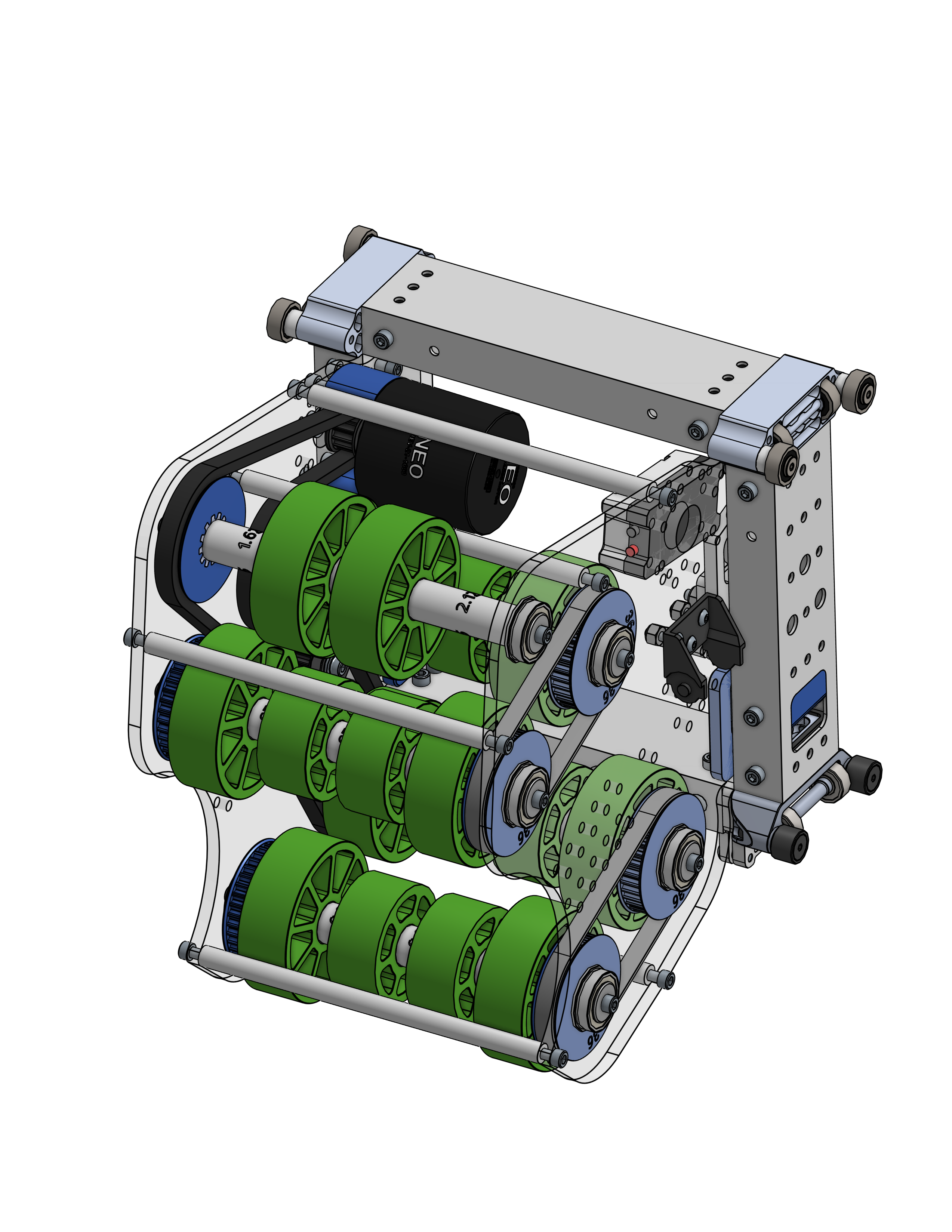
Version 1 end effector assembly render.
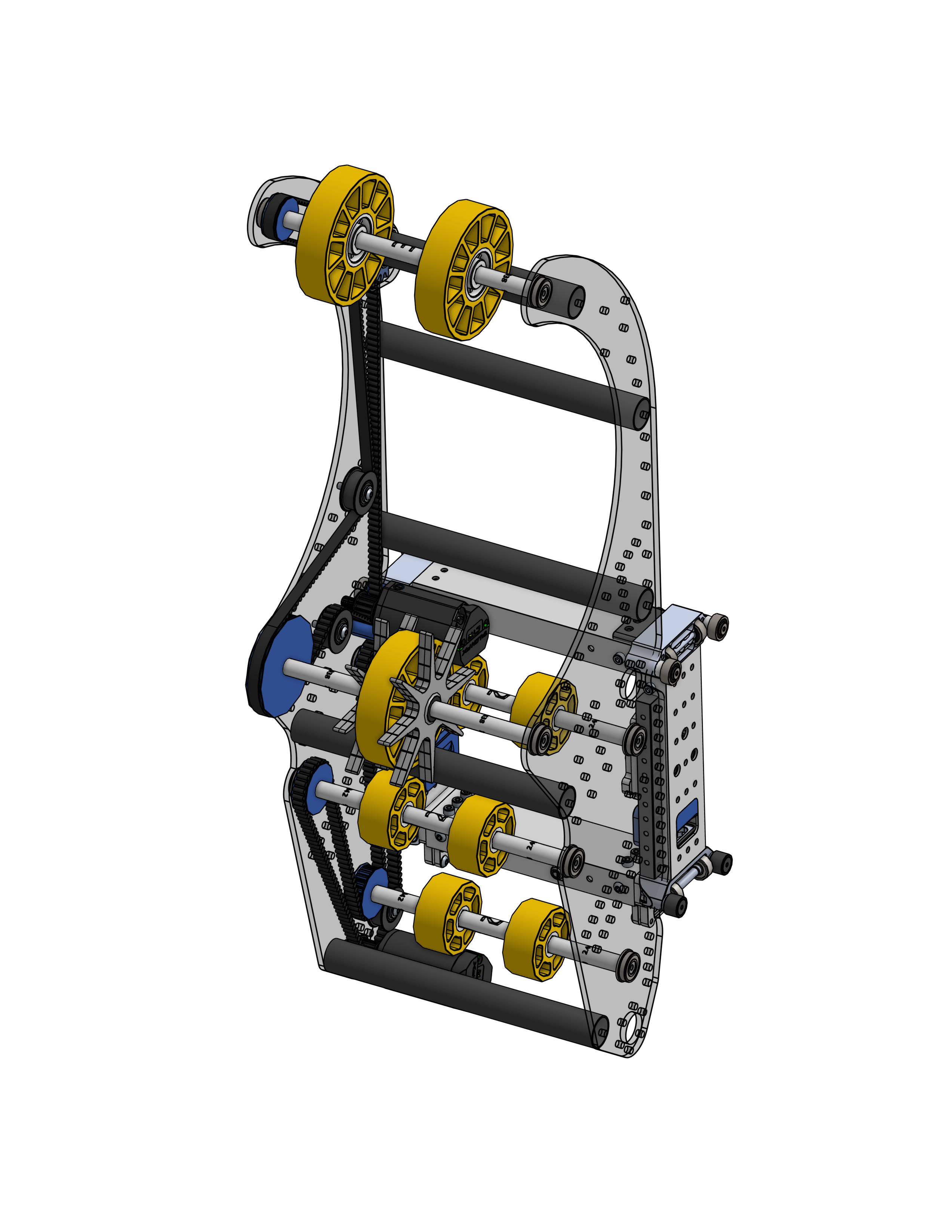
Version 2 end effector assembly render with updated roller geometry.
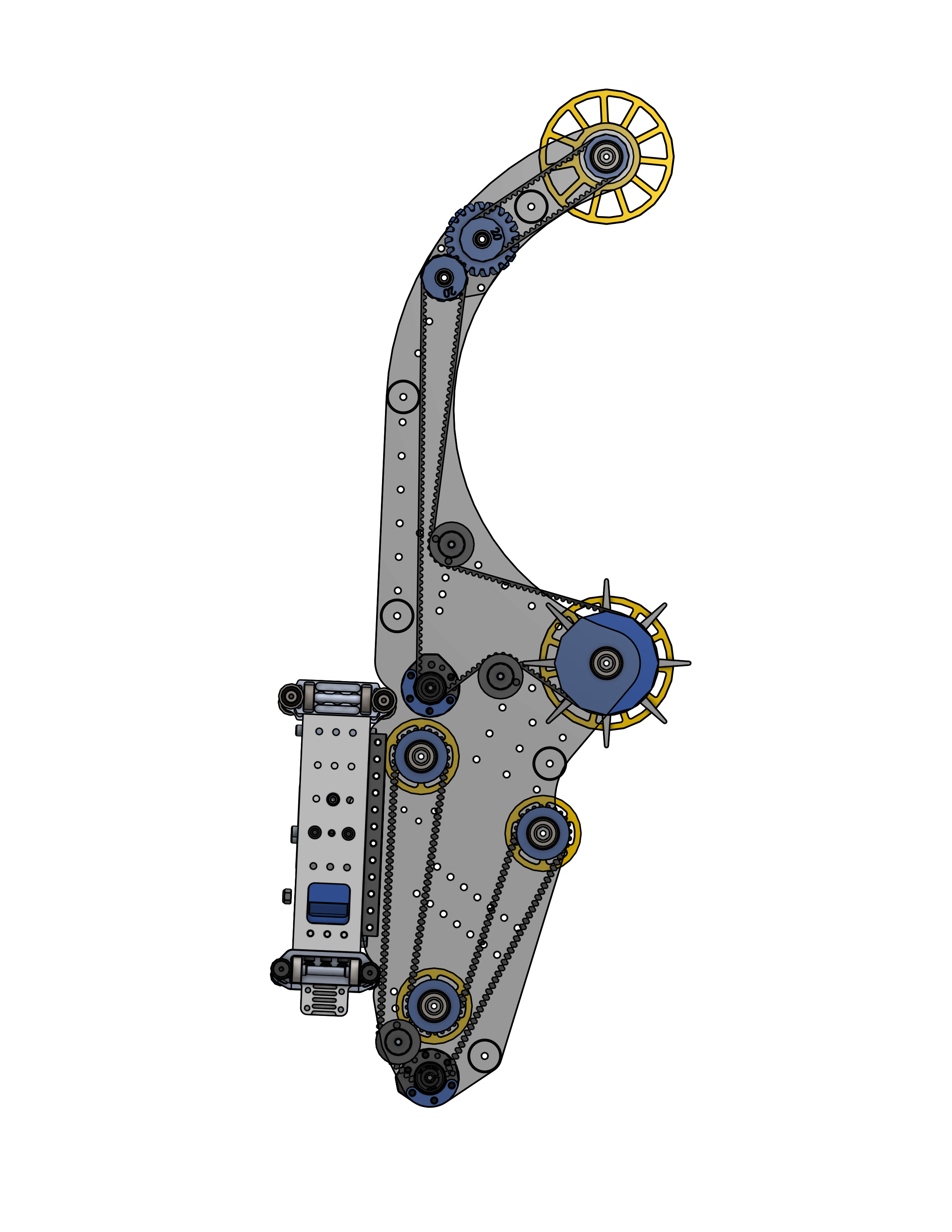
Serpentine belt routing across intake rollers and upper scoring wheels.
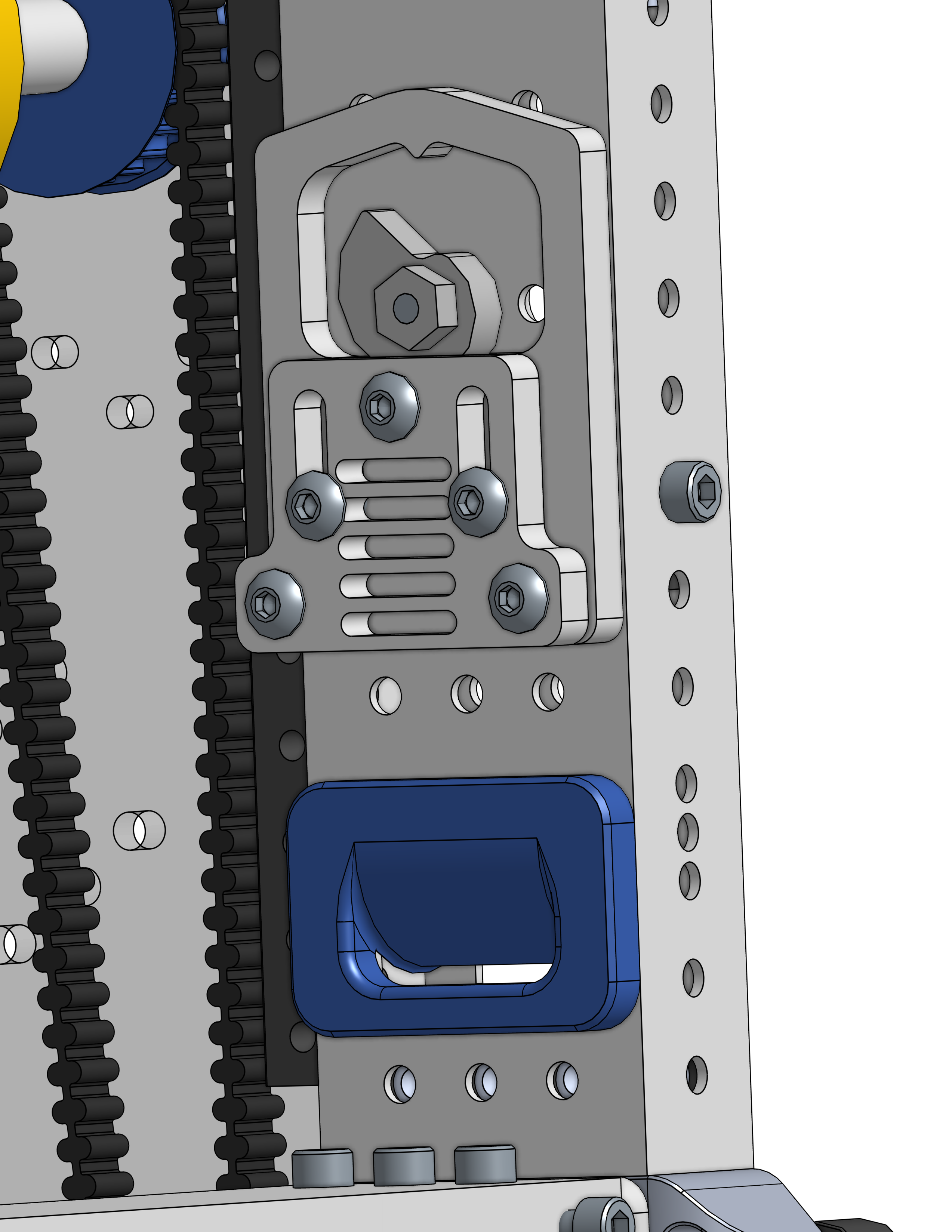
Cam-based belt clamp tensioner used for rapid serviceability and consistent belt preload.
Climb Mechanism
- Dyneema-driven spool system
- 338:1 reduction
- 1.5" spool diameter
- Single-DOF arm
- Lifted full 150 lb robot
- Current-limited for smooth torque bandwidth usage
Controls & Software Architecture
In parallel with CAD, I developed the primary robot software architecture.
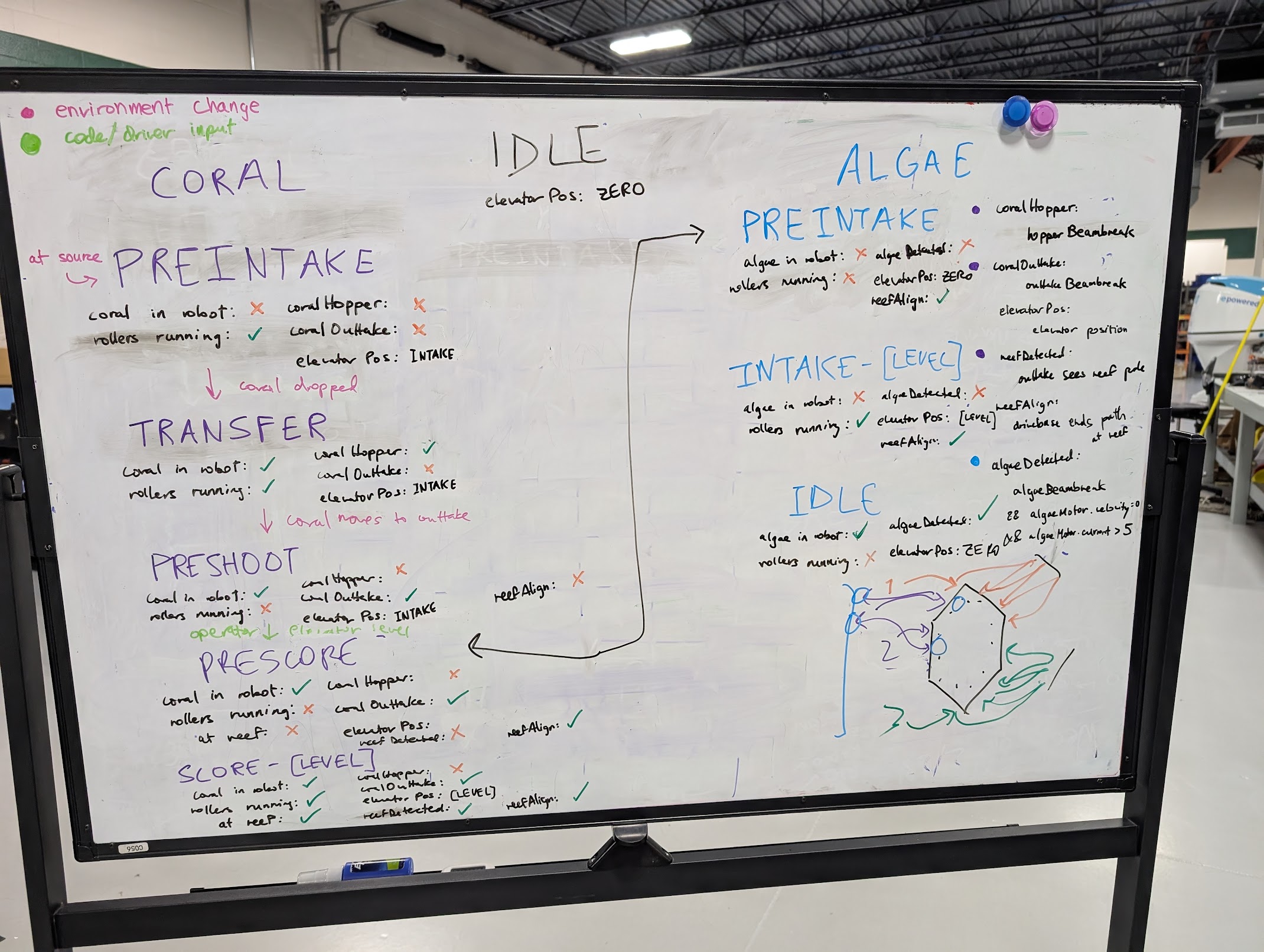
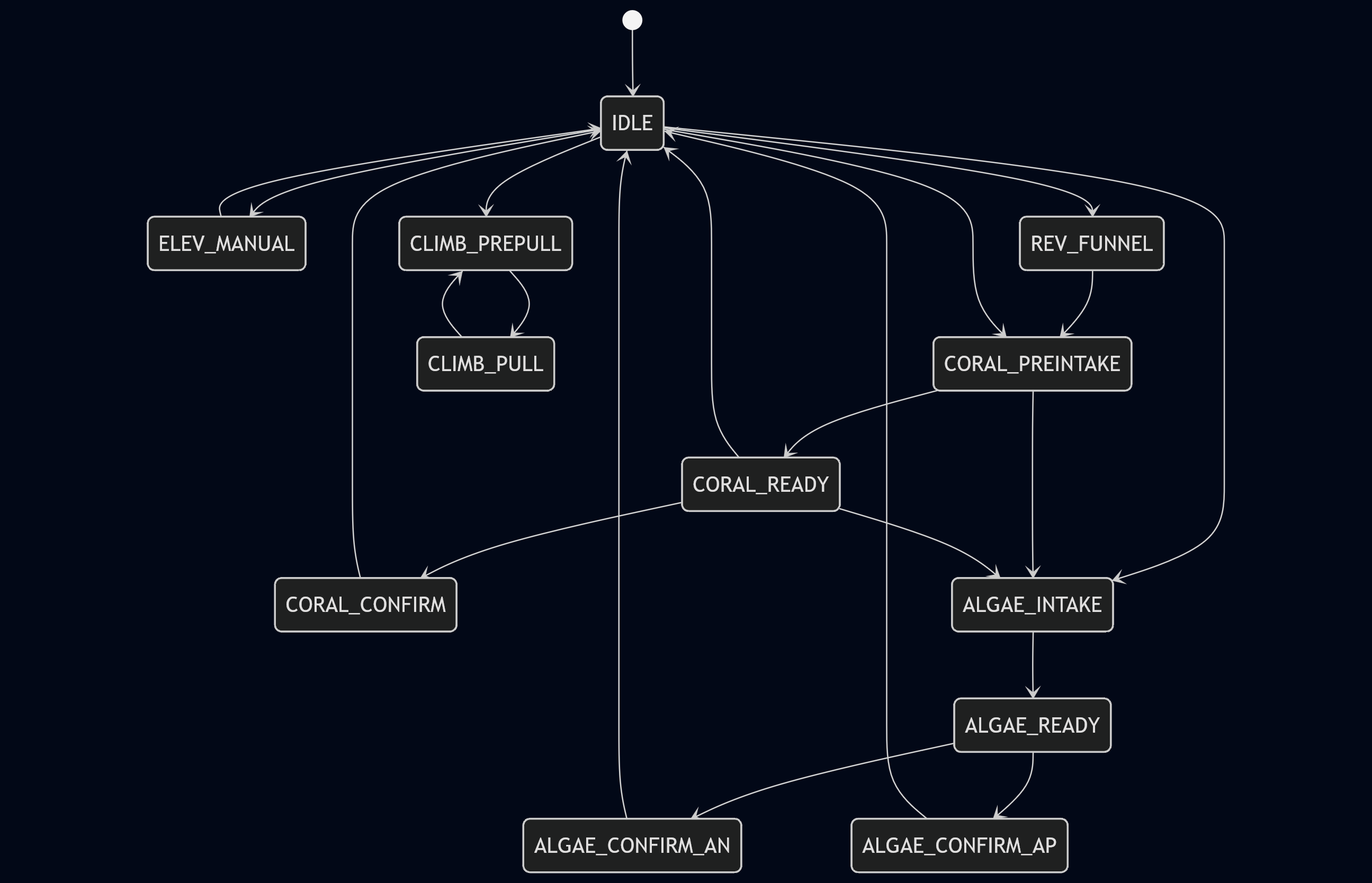
Superstructure State Machine
Trigger-driven finite state machine coordinating:
- Elevator position
- End effector mode
- Drivetrain pose
- Gamepiece detection
- Driver/operator inputs
A Python solver enumerated 1,280 possible states → validated to 52 legal states → reduced to 14 unique result states. Mechanism commands were event-driven and interruptible, enabling modular autonomous routines, teleop + auto reuse, manual override capability, and deterministic transitions.
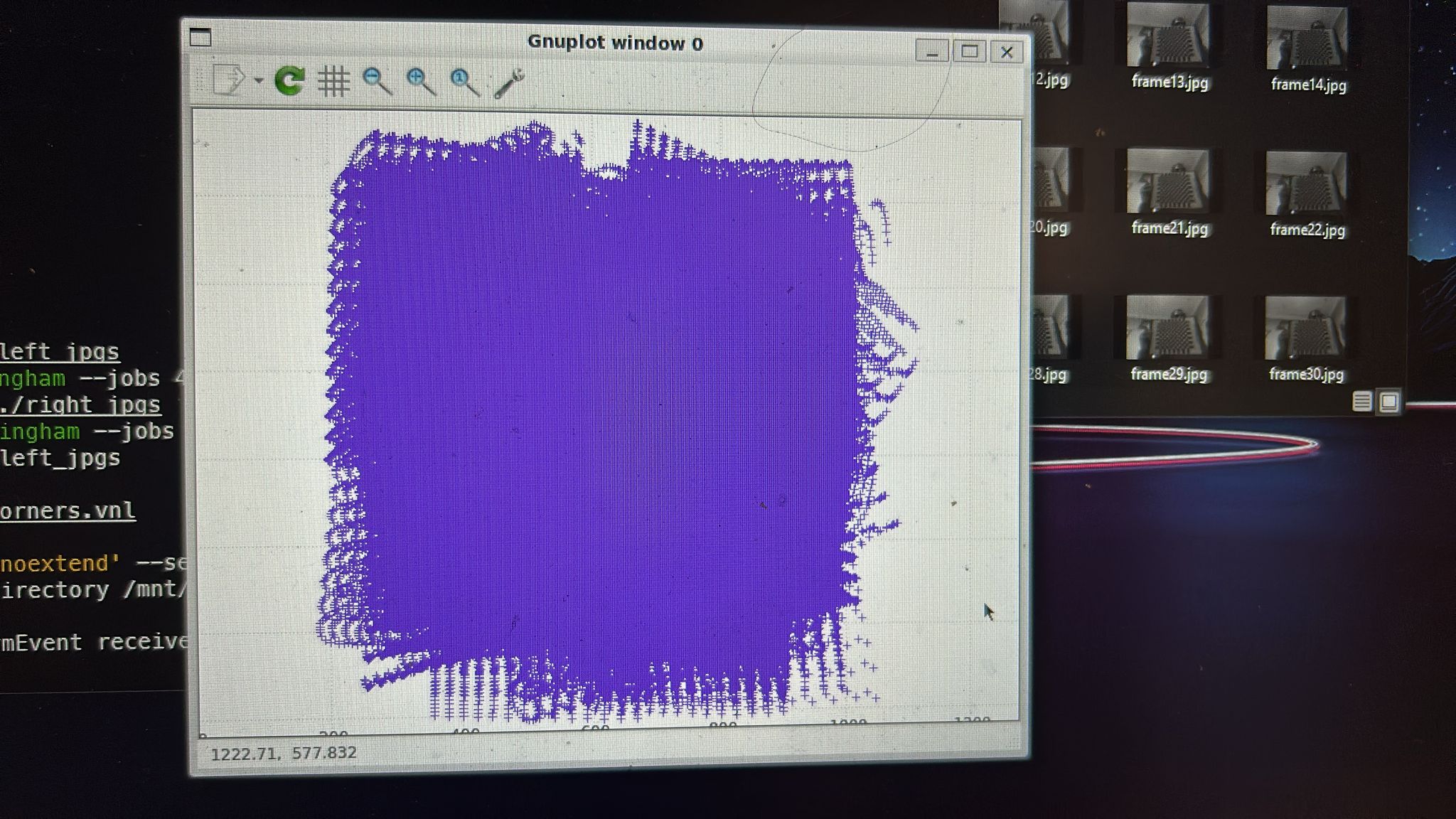
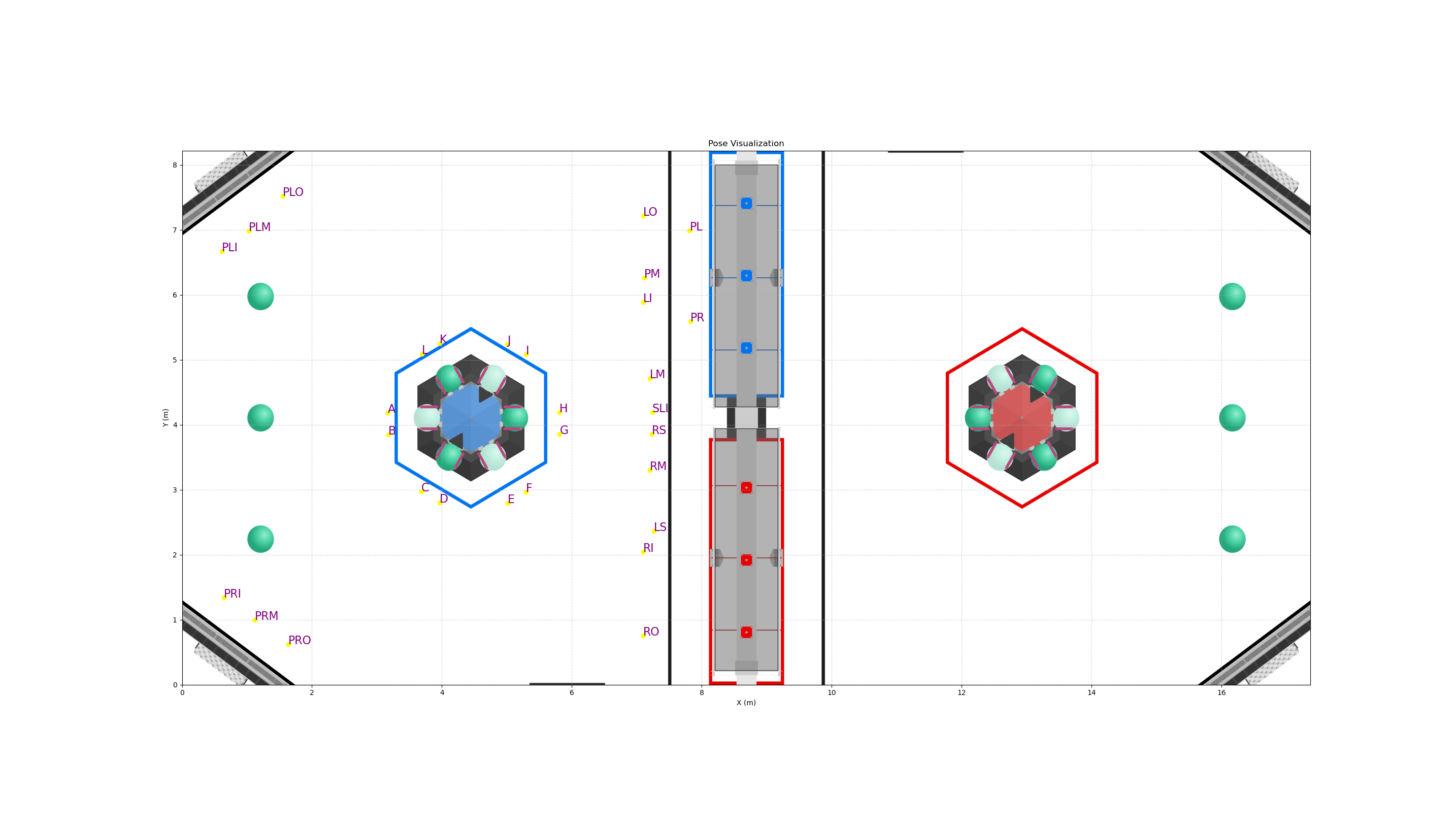
Vision Localization
- PhotonVision 3D PnP solve
- Custom camera calibration using mrcal
- Odometry + vision fusion with latency compensation
- Multi-tag solve at distance
- Single-tag trigonometric solve near scoring targets
Localization fed directly into auto-alignment, target-relative elevator raising, intelligent intake activation, and modular trajectory chaining.
Autonomous Structure
Autonomous routines built from modular trajectory segments using Choreo:
- Reset odometry per segment
- Pose-triggered elevator extension
- Pose-triggered scoring events
- Holonomic alignment during scoring
- State-machine synchronized mechanism control
Autos were limited by mechanical cycle time rather than software logic by season end.
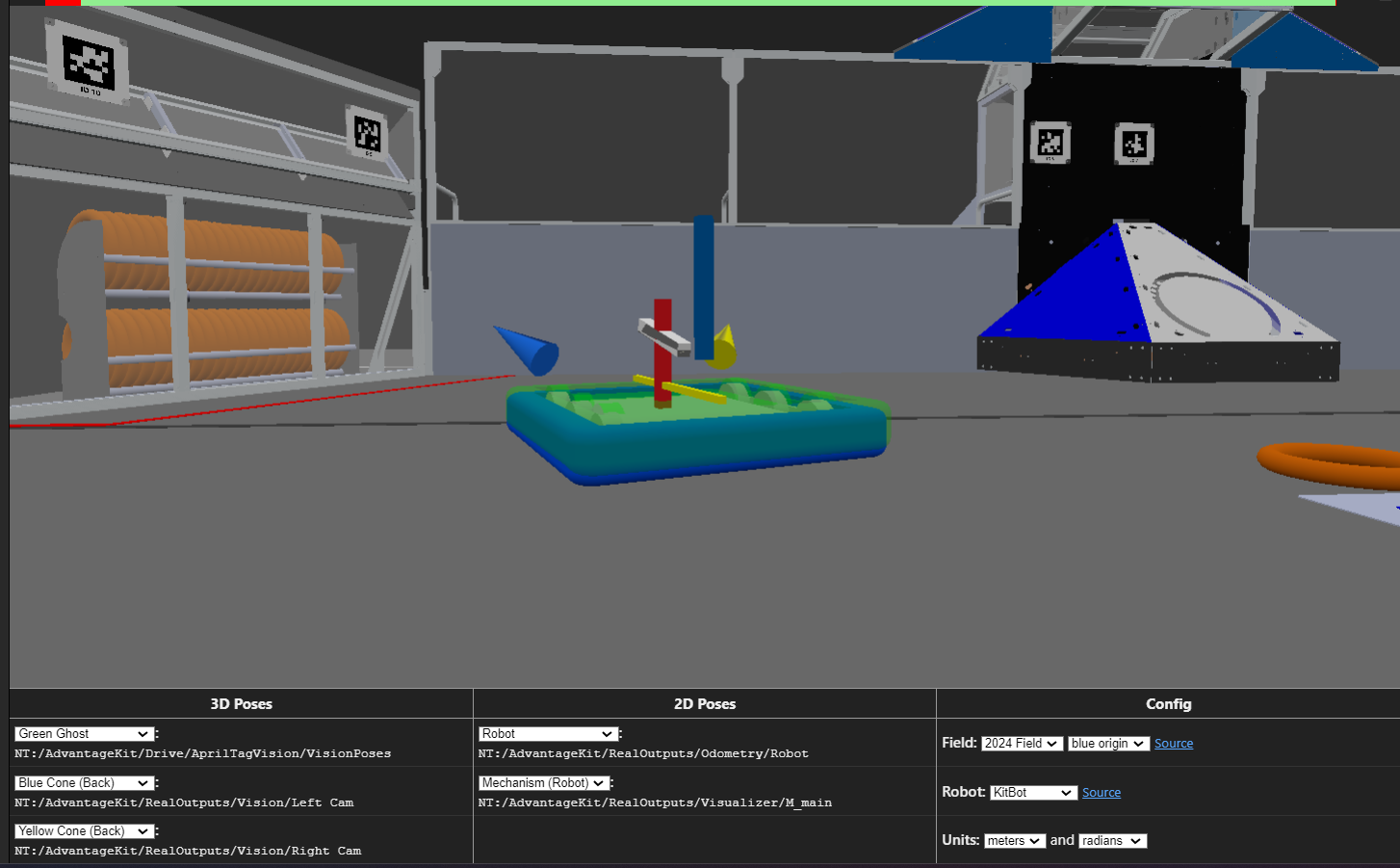
Logging & Validation
- AdvantageKit structured logging (Foxglove-style)
- Full motor telemetry logging
- State transition logging
- Pose estimation logging
- Log replay simulation for FSM validation
- Simulated sensor triggers for automation testing
Overall Performance
Cycle times improved from ~7 early season to ~15 by final event after automation integration. Peaked at 86 OPR (#11 in World Championship division, top 15% at event).
Previous Seasons
More Projects
2024 Robot (v2)
2024 Elevator Prototype
2023 Robot (v2)
2023 Custom Swerve (v2)